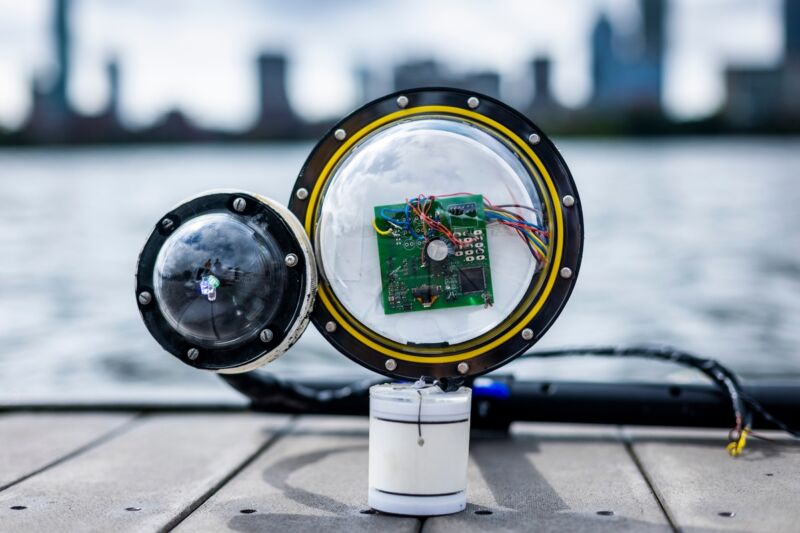
Adam Glanzman
MIT-ingeniører har bygget et trådløst, batterifritt undervannskamera, som er i stand til å høste energi selv mens de bruker svært lite strøm, ifølge en nytt papir publisert i tidsskriftet Nature Communications. Systemet kan ta fargebilder av fjerntliggende objekter under vann – selv i mørke omgivelser – og overføre data trådløst for sanntidsovervåking av undervannsmiljøer, hjelpe oppdagelsen av nye sjeldne arter eller overvåke havstrømmer, forurensning eller kommersielle og militære operasjoner.
Vi har allerede ulike metoder for å ta undervannsbilder, men ifølge forfatterne, “De fleste av havet og marine organismer er ikke observert ennå.” Det er delvis fordi de fleste eksisterende metoder krever å være bundet til skip, undervannsdroner eller kraftverk for både kraft og kommunikasjon. De metodene som ikke bruker tethering må inkludere batteristrøm, noe som begrenser levetiden deres. Selv om det i prinsippet er mulig å høste energi fra havbølger, undervannsstrømmer eller til og med sollys, vil det å legge til nødvendig utstyr for å gjøre det resultere i et mye større og dyrere undervannskamera.
Så MIT-teamet begynte å utvikle en løsning for en batterifri, trådløs bildebehandlingsmetode. Designmålet var å minimere nødvendig maskinvare så mye som mulig. Siden de ønsket å holde strømforbruket på et minimum, brukte for eksempel MIT-teamet billige hyllesensorer. Avveiningen er at slike sensorer bare produserer gråtonebilder. Teamet trengte også å utvikle en laveffektsblits, siden de fleste undervannsmiljøer ikke får mye naturlig lys.
SS Afzal et al., 2022
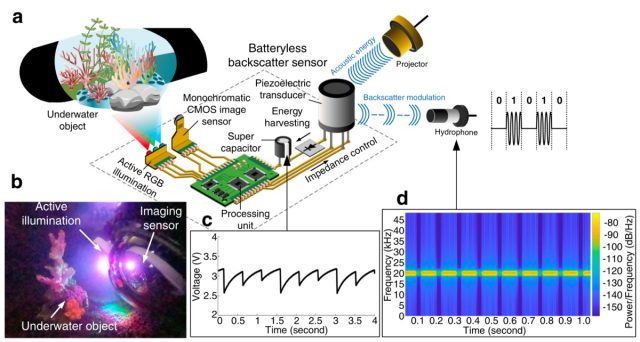
Løsningen på begge utfordringene viste seg å inkludere røde, grønne og blå lysdioder. Kameraet bruker den røde LED-en for in situ-belysning og tar bildet med sensorene, og gjentar deretter prosessen med de grønne og blå LED-ene. Bildet kan se svart-hvitt ut, ifølge forfatterne, men de tre lysfargene fra LED-ene reflekteres i den hvite delen av hvert bilde. Så et fullfargebilde kan rekonstrueres under etterbehandling.
“Da vi var barn i kunstklassen, ble vi lært at vi kunne lage alle farger med tre grunnleggende farger,” sa medforfatter Fadel Adib. “De samme reglene følger for fargebilder vi ser på datamaskinene våre. Vi trenger bare rødt, grønt og blått – disse tre kanalene – for å lage fargebilder.”
I stedet for et batteri, er sensoren avhengig av piezo-akustisk backscatter for kommunikasjon med ultralav strøm etter at bildedataene er kodet som biter. Denne metoden trenger ikke å generere sitt eget akustiske signal (som med ekkolodd, for eksempel), og stole i stedet på modulerende refleksjoner av innfallende undervannslyder for å overføre data en bit om gangen. Disse dataene blir plukket opp av en fjernmottaker som er i stand til å gjenopprette de modulerte mønstrene, og den binære informasjonen brukes deretter til å rekonstruere bildet. Forfatterne anslår at undervannskameraet deres er omtrent 100 000 ganger mer energieffektivt enn dets motstykker, og kan kjøre i flere uker i strekk.
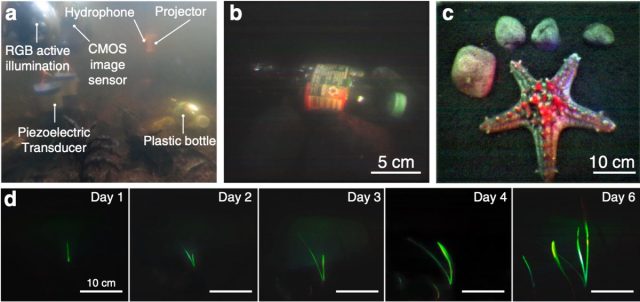
Naturligvis bygde teamet en proof-of-concept-prototype og gjorde noen tester for å demonstrere at metoden deres fungerte. For eksempel avbildet de forurensning (i form av plastflasker) i Keyser Pond i det sørøstlige New Hampshire, i tillegg til å avbilde en afrikansk sjøstjerne (Protoreaster lincklii) i “et kontrollert miljø med ekstern belysning.” Oppløsningen på det sistnevnte bildet var god nok til å fange de forskjellige tuberklene langs sjøstjernens fem armer.
SS. Afzal et al., 2022
Teamet var også i stand til å bruke sitt trådløse undervannskamera for å overvåke veksten til en vannplante (Aponogeton ulvaceus) over flere dager, og for å oppdage og lokalisere visuelle tagger som ofte brukes til undervannssporing og robotmanipulasjon. Kameraet oppnådde høye deteksjonshastigheter og høy lokaliseringsnøyaktighet opp til en avstand på ca. 3,5 meter (ca. 11 og en halv fot); Forfatterne foreslår at lengre deteksjonsområder kan oppnås med sensorer med høyere oppløsning. Avstand er også en faktor i kameraets energiinnsamlings- og kommunikasjonsevner, per tester utført i Charles River i østlige Massachusetts. Som forventet avtar begge disse kritiske egenskapene med avstanden, selv om kameraet vellykket overførte data 40 meter (131 fot) unna mottakeren.
Kort sagt, “Den tjoreløse, rimelige og fullt integrerte metoden vår gjør den til en ønskelig tilnærming for massive havutplasseringer,” skrev forfatterne. Oppskalering av tilnærmingen deres krever mer sofistikerte og effektive svingere, samt akustiske undervannsoverføringer med høyere effekt. Det er mulig at man også kan bruke eksisterende mesh-nettverk av bøyer på havoverflaten, eller nettverk av undervannsroboter som Argo-floats, for å fjernstyre energi-høstingskameraene.
“En av de mest spennende bruksområdene til dette kameraet for meg personlig er i sammenheng med klimaovervåking,” sa Adib. “Vi bygger klimamodeller, men vi mangler data fra over 95 prosent av havet. Denne teknologien kan hjelpe oss med å bygge mer nøyaktige klimamodeller og bedre forstå hvordan klimaendringer påvirker undervannsverdenen.”
DOI: Nature Communications, 2022. 10.1038/s41467-022-33223-x (Om DOIer).