Til tross for hva den lenge glemte flekken på den hvite skjorten din kan få deg til å tro, er mennesker ganske gode til å gå med en kopp kaffe og unngå søl, selv om suksessraten vår ikke er helt 100 prosent. Hver gang du klarer å få koppen med joe fra ett punkt til et annet uten søl, fullfører du intuitivt en lite forstått fysikkbragd: å manipulere et komplekst objekt som f.eks. væske.
Det er ifølge en gruppe forskere ved Arizona State University (ASU) som har modellert det kaffebærende fenomenet i et forsøk på å gjennomsyre roboter med samme finesse. I en verden med økende automatisering forventes maskiner å utføre mer fingernemlige bevegelser, forklarer Brent Wallace, en Ph.D. student ved ASUs School of Electrical, Computer, and Energy Engineering som var involvert i arbeidet. “Men selv for enkle oppgaver, som å bære en kopp vann eller en kopp kaffe, sliter roboten. Hver dag lager du og jeg en kopp kaffe, og 99 av 100 dager søler vi det ikke på oss selv, sier Wallace. “Så hvordan får vi innflytelse på å takle den slags problemer? Vel, la oss studere hvordan mennesker oppfører seg i slike situasjoner.»
☕️ Vitenskap forklarer verden rundt oss. Vi hjelper deg å forstå det hele – bli med i Pop Mech Pro.
Med utgangspunkt i tidligere arbeid ved Northeastern University, som fant at mennesker har to hovedtilnærminger for å manipulere et komplekst objekt som en væske, simulerte ASU-teamet disse svarene, lasering inn på overgangsfasen mellom de to for å forstå hvorfor mennesker viser en binær respons – og for å se hvordan roboter kan lære å gjøre det samme i fremtiden. De funn ble publisert i tidsskriftet Fysisk gjennomgang brukt på slutten av 2021.
Tilnærming nr. 1 kalles en lavfrekvent strategi, og den innebærer at menneskelige deltakere utøver en jevn, sakte skiftende kraft frem og tilbake på kaffekopp. Som et resultat, hvis du svinger kruset til venstre, følger javaen på innsiden etter, som en pendel. Dette kalles i-fase synkronisering. Alternativt er tilnærming nr. 2 en høyfrekvent strategi der folk utøver en rykkete, raskt skiftende kraft på kruset. Som et resultat av denne tilnærmingen, hvis du svinger kruset til venstre, flytter javaen inni seg til høyre side av koppen. Dette er kjent som antifasesynkronisering.
Siden begge strategiene fungerte, om enn i motsatte ender av spekteret, antok Wallace at noen deltakere i Northeastern-studien byttet frem og tilbake mellom de to tilnærmingene, og flyttet koppen med velbehag i noen situasjoner, og mer delikat andre ganger. Det fikk ham til å lure på: Hvor skjer overgangen mellom synkronisering i fase og motfase?
For å teste hypotesen sin satte Wallace opp et simulert mekanisk eksperiment slik at han kunne bruke et ubegrenset antall testpersoner. Han valgte å sette opp en ikke-lineær modell av en pendel festet til en bevegelig vogn. Vognen står for kruset, og pendelen representerer den skvettende kaffen. Et ikke-lineært system tar hensyn til alle kaotisk atferd som kan eksistere i kaffekoppen vår, forklarer Wallace. De fleste systemer i den virkelige verden er ikke-lineære fordi de er vanskelige å definere og ikke eksisterer i et vakuum. Mens du kjører en bil, for eksempel, vil den gå 50 mph hvis du trykker ned på gasspedalen, men den vil ikke gå 5000 mph hvis du fortsetter å trykke ned. Et lineært system er derimot mye mer forutsigbart: Et fjærsystem eller et klokke vil alltid bevege seg på samme vanlige måte. Tenker matematisk, sjekker dette ut. Grafen for den lineære ligningen y = x er alltid en rett linje; i mellomtiden, grafen for y = x2 er en ikke-lineær ligning som ser ut som en kurve, som representerer ulike løsninger, ikke bare én.
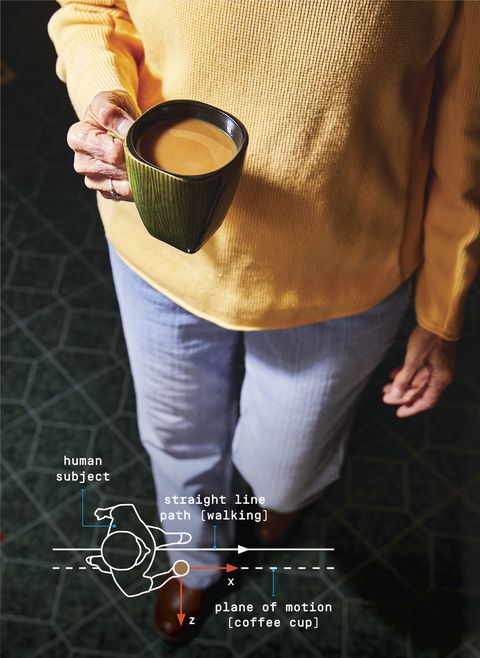
Alyse Markel/Popular Mechanics
Wallace og teamet hans fant ut at overgangsfasen mellom hver av strategiene var variert, men at i begge tilfeller kunne mennesker bytte mellom tilnærmingene “brått og effektivt”, ifølge papiret deres. Overgangsfasen var som forventet den mest kaotiske, eller uforutsigbar. Men mennesker svingte bort fra den mellomtingen og holdt seg tett til den ene eller den andre tilnærmingen.
Forskerne tror at de kan implementere disse kontrollene i roboter for å gjøre bevegelsene deres mer forutsigbare og pålitelige, tilpasset håndtering av komplekse objekter i stadig skiftende miljøer. Mens det for øyeblikket er mulig å programmere maskiner til å fungere på en binær basis – som mennesker som kraftig slenger på koppen sin eller går forsiktig med den – roboter er fortsatt ikke raffinerte nok til å håndtere bytte mellom de to modusene. På en produksjonslinje, for eksempel, er hengende pendelsystemer ganske vanlige, sier Wallace. Ved å kontrollere det indre grader av frihet i et produksjonssystem som dette, a robotarm kan mer pålitelig sveise den riktige delen uten å overskride og smelte sammen en annen seksjon.
Dette paradigmet kan også føre til bedre proteser, ifølge Ying-Cheng Lai, en professor ved ASUs School of Electrical, Computer, and Energy Engineering som var involvert i arbeidet. La oss si at du har en protese og ønsker å lage en kopp kaffe. Du må få et signal fra din hjerne til protesen, men det er vanskelig å få de to til å matche. “Hvis du har en ide om hva du vil at protesen skal gjøre, som å lage en kopp kaffe, kan du bygge inn den slags naturlige intuisjoner som mennesket har i et vanlig scenario for å filtrere referansekommandoene som kommer fra hjernen,” forklarer han.
For å gjøre alt dette til en realitet, kreves det fortsatt arbeid for å bedre kvantifisere de subtile endringene mellom tilnærminger. Wallace sier at teamet vil forsøke å studere systemer med flere frihetsgrader, som en pendel med en annen pendel hengende fra den. Hvis alt ordner seg, kan vi se en dag roboter som beveger seg med forsiktig hensikt – akkurat som oss.
🍳 Mer Kjøkkenfysikk: Dette er grunnen til at mat fester seg til stekepannen din
Du kan takke termokapillær konveksjon for å få maten til å holde seg til favoritten din stekepanne. Det er riktig, fysikk kan forklare hvorfor kjøtt og grønnsaker noen ganger setter seg fast under matlaging. Fenomenet fører til at varm olje perler, sprekker og sprer seg til ytterkantene av en panne, og etterlater den fryktede tørre flekken i midten.
Forskning ledet av Alexander Fedorchenko fra det tsjekkiske vitenskapsakademiet oppdaget at denne typen konveksjon var et resultat av ujevn oppvarming. Når matoljen når et kritisk tynt punkt – som i denne studien konsekvent skjedde midt i pannen – brister den på grunn av tap av overflatespenning. For å lindre problemet, prøv å bruke litt mer olje for å gjøre det vanskeligere å nå det kritisk tynne bruddpunktet.
—Daisy Hernandez
Dette innholdet er opprettet og vedlikeholdt av en tredjepart, og importert til denne siden for å hjelpe brukere med å oppgi e-postadressene sine. Du kan kanskje finne mer informasjon om dette og lignende innhold på piano.io